Medindo distâncias com o sensor ultrassônico
O ouvido humano consegue identificar ondas de até aproximadamente 20 KHZ, frequências acima disso são chamadas de ultrassônicas e é com esse tipo de onda que o sensor opera. Quando acionado, são emitidos 8 pulsos de 40 KHz, então o sensor detecta se há algum sinal de retorno; caso seja identificado, é emitido no pino de saída um sinal de nível alto cujo tempo de duração é igual ao tempo calculado entre o envio e o retorno do sensor ultrassônico.
Por meio do tempo fornecido pelo sensor, é possível calcular a distância até o objeto/obstáculo, utilizando a equação:
Distância = (Tempo de duração do sinal de saída × velocidade do som) / 2
Onde a velocidade do som pode ser considerada como 340 m/s (este valor é uma aproximação, pois a velocidade do som no ar depende de fatores como umidade e temperatura). Note bem as unidades utilizadas no cálculo, pois, para se obter um resultado consistente, o Tempo de duração do sinal de saída deve estar em segundos, para assim obter-se a distância em metros. Sem a divisão por 2, o valor calculado corresponderia à distância que o pulso percorreu para chegar até o objeto/obstáculo somado com a distância de volta.
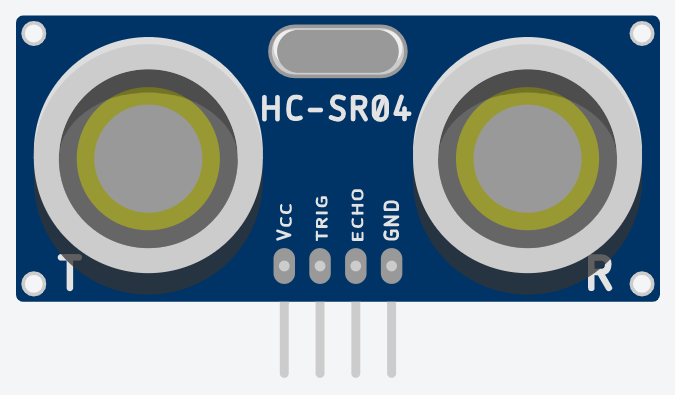
O sensor ultrassônico HC-SR04 possui 4 pinos. Normalmente eles são identificados na placa, conforme a imagem abaixo. O pino posicionado na extremidade direita (GND) deve ser conectado ao terminal GND, enquanto o da extremidade esquerda (Vcc) deve ser conectado ao terminal de 5V. O pino TRIG serve para controlar o envio dos pulsos ultrassônicos, enquanto que o pino ECHO retorna para o Arduino o tempo de duração entre o envio e a recepção do sinal. O sensor opera com distâncias de aproximadamente 2cm até 4m, com o ângulo de efeito sendo 15º.
Neste projeto, você montará um circuito onde um buzzer tocará ao se aproximar uma certa distância do sensor. Será utilizado um buzzer do tipo passivo, pois é o que o simulador do Tinkercad oferece, porém sinta-se à vontade para utilizar um buzzer ativo; o código sofrerá uma pequena alteração, porém será explicitado onde fazê-la.
Hardware
Materiais necessários:
- 1x Sensor ultrassônico HC-SR04
- 1x Buzzer passivo
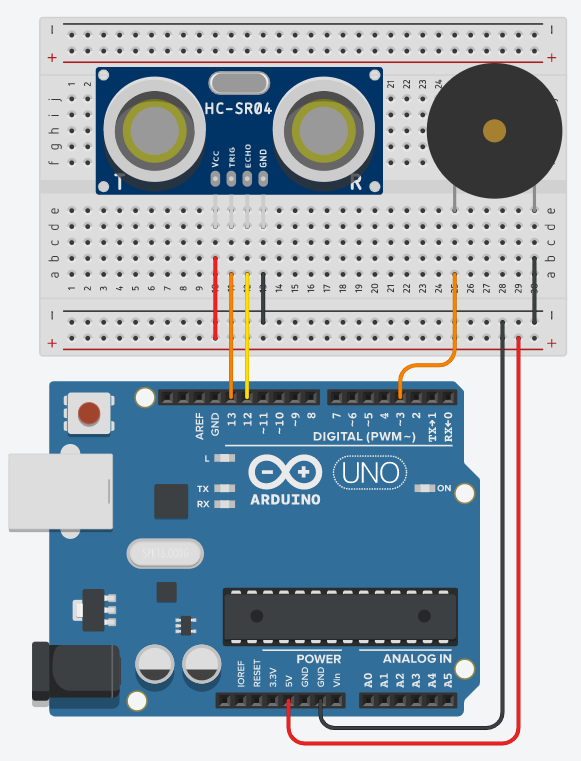
Esquemático:
Software
Para começar, é necessário declarar e inicializar algumas variáveis e constantes. Será utilizado o valor da velocidade do som em metros por microssegundos, pois é necessário manter a consistência de unidades nos cálculos, já que o sensor retorna o tempo em microssegundos.
const int pinoTrigger = 13; // Pino usado para disparar os pulsos do sensor
const int pinoEcho = 12; // pino usado para ler a saida do sensor
const int pinoBuzzer = 3;
const float velocidadeSom = 0.000340; // Velocidade do som em metros por microssegundo
float tempoEcho; // Tempo de resposta do sensor
float distancia; // Distância do sensor ao objeto detectado
Em seguida, é necessário definir os modos, inicializar os pinos e iniciar o seria na função setup().
void setup(){
// Configura pino de Trigger como saída e inicializa com nível baixo
pinMode(pinoTrigger, OUTPUT);
digitalWrite(pinoTrigger, LOW);
// Configura pino do buzzer como saída e inicializa com nível baixo
pinMode(pinoBuzzer, OUTPUT);
digitalWrite(pinoBuzzer, LOW);
// configura pino ECHO como entrada
pinMode(pinoEcho, INPUT);
// Inicializa a porta serial
Serial.begin(9600);
}
Antes de escrever a função loop(), é preciso definir uma outra função, que será utilizada para ativar a emissão de ondas ultrassônicas pelo sensor. Isso é feito facilmente, controlando a ativação do pino pinoTrigger: basta colocá-lo em modo alto e, após alguns microssegundos, voltar para o modo baixo.
void disparaPulsoUltrassonico(){
digitalWrite(pinoTrigger, HIGH);
delayMicroseconds(10);
digitalWrite(pinoTrigger, LOW);
}
Na função loop() para ativar o sensor, deve-se utilizar a função disparaPulsoUltrassonico(). Logo em seguida, é necessário capturar os dados gerados pelo sensor. Isso pode ser feito através da função pulseIn().
A função pulseIn() captura a duração de um pulso em um pino, sendo necessário passar dois parâmetros, respectivamente:
pino: pino ao qual a leitura será realizada;
valor: valor HIGH ou LOW, dependendo do tipo de leitura desejada.
Se o valor HIGH é passado para a função, a função pulseIn() espera o pino ir do estado LOW para HIGH, começa a temporizar e, quando o pino retorna ao estado LOW, o temporizador é parado. A função retorna o tamanho do pulso em microssegundos. O tempo de retorno será armazenado na variável tempoEcho.
tempoEcho = pulseIn(pinoEcho, HIGH);
Agora com o tempo em mãos, é possível calcular a distância utilizando a fórmula dada anteriormente. Aqui também haverá uma multiplicação por 100 para, assim, obter a distância em centímetros. O código ficará da seguinte maneira:
distancia = ((tempoEcho*velocidadeSom_mporus)/2)*100;
Agora, é possível imprimir o resultado no Serial.
Serial.print("Distancia em centimetros: ");
Serial.println(distancia);
Dessa maneira, é possível ativar o buzzer quando o sensor lê uma certa distância. No código abaixo, a frequência 784, que corresponde à nota G (sol), tocará quando algo estiver a menos de 120 centímetros do sensor. Caso você esteja utilizando um buzzer ativo, basta substituir a função tone() por digitalWrite(buzzer, HIGH);
if(distancia <= 80)
tone(buzzer, 784, 200);
else
digitalWrite(buzzer, LOW);
Para finalizar a função loop(), é preciso acrescentar um pequeno delay() para não sobrecarregar o serial e tornar possível uma leitura mais nítida.
delay(200);
}
O código completo ficará da seguinte forma:
const int pinTrigger = 13; // Pino para disparar os pulsos do sensor
const int pinEcho = 12; // Pino para ler a saida do sensor
const int buzzer = 3; // Pino do buzzer
const float velocidadeSom = 0.000340; // Velocidade do som, metros por microssegundo
float tempoEcho; // Tempo de resposta do sensor
float distancia; // Distância do sensor ao objeto detectado
void setup(){
// Configura pino de Trigger como saída e inicializa com nível baixo
pinMode(pinoTrigger, OUTPUT);
digitalWrite(pinoTrigger, LOW);
// Configura pino do buzzer como saída e inicializa com nível baixo
pinMode(buzzer, OUTPUT);
digitalWrite(buzzer, LOW);
// configura pino ECHO como entrada
pinMode(pinoEcho, INPUT);
// Inicializa a porta serial
Serial.begin(9600);
}
void loop(){
// Envia pulso para o disparar o sensor
disparaPulsoUltrassonico();
// Mede o tempo de duração do sinal no pino de leitura(us)
tempoEcho = pulseIn(pinEcho, HIGH);
distancia = ((tempoEcho*velocidadeSom_mporus)/2)*100;
// Impressão no serial
Serial.print("Distancia em centimetros: ");
Serial.println(distancia);
// Acionamento do buzzer
if(distancia <= 120)
tone(buzzer, 784, 200);
else
digitalWrite(buzzer, LOW);
delay(200);
}
// Funçao para enviar o pulso de trigger para o sensor ultrassônico
void disparaPulsoUltrassonico(){
digitalWrite(pinTrigger, HIGH);
delayMicroseconds(10);
digitalWrite(pinTrigger, LOW);
}
Para testar o projeto, basta utilizar alguma fita métrica, colocando objetos a distâncias variadas do sensor e analisando se a medida física corresponde ao valor indicado no monitor serial. Note também que quando o objeto estiver a 120 centímetros ou menos, o buzzer deve começar a tocar.
Na plataforma Tinkercad, enquanto o projeto está sendo simulado, basta clicar no sensor ultrassônico e uma pequena interface se abrirá. Nesta interface, a área de funcionamento do sensor é destacada na cor azul. É possível posicionar um objeto nela e sua distância (tanto em polegadas quanto em centímetros) aparecerá logo acima do sensor.
O Arduino, aliado com esse sensor, abre um leque de possibilidades para projetos interessantes, como sonares, robôs autônomos que detectam e mapeiam paredes de um ambiente, velocímetros e até mesmo automação para casa (como um detector de presença para ativar lâmpadas ou eletrodomésticos, por exemplo).